Hi, I have a few stange issues with the vehicle physx object. It is a convex mesh and I used the physx 4 documentation and the physx sample project to get it in working.
The first issue is that the wheels spin but the vehicle does not move. The solution I found to get it to move is by changing the origin of the wheels above the centre which obviously doesn't give the correct rotatation but the vehicle moves. The documentation has a few things listed a few things to troubleshoot the issue, however in the physx debugger, in the first option, I'm not sure where to long and for the rest where it says to use functions, those functions do not exist or at least I can't find them, but I don't think that's the cause anyway since the vehicle does move if the origin is changed. Any idea's on what the issue could be or what I can do to try to fix this.
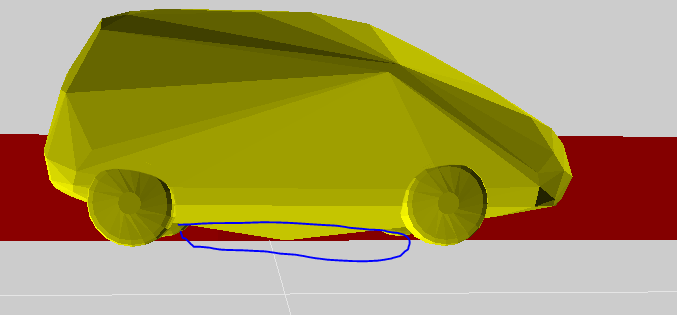
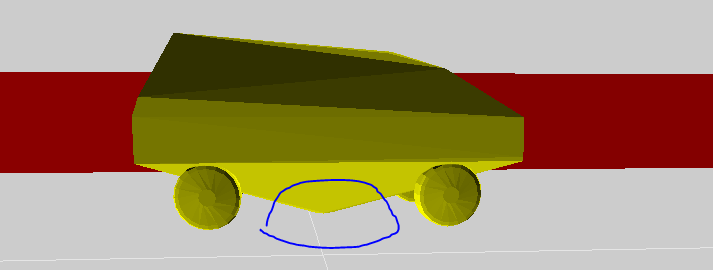
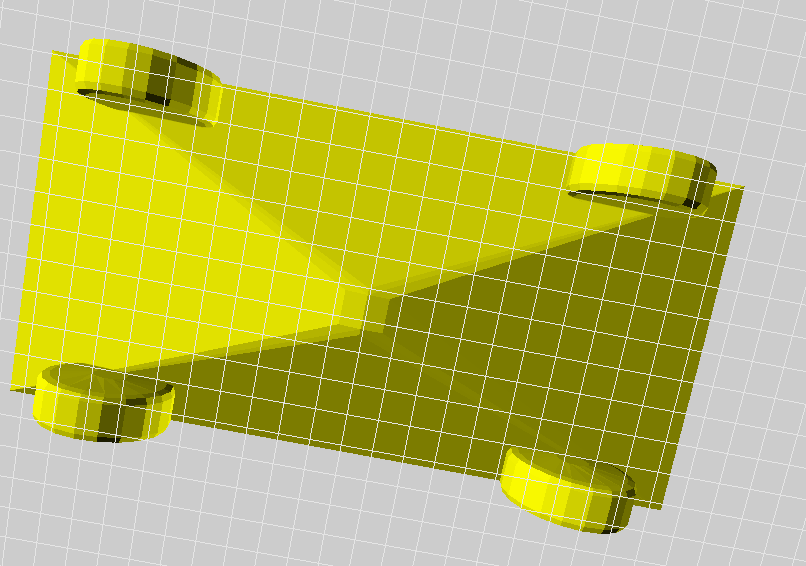
My second issue can be seen in the images, below. A point gets created at the bottom of the mesh, which is not found in the 3D models. I have tested two different chassis models and it still occurs. I thought this maybe getting stuck on the ground cause the above issue, however, I have found a solution that still creates the point but it is not as bad. I have changed the origin point of the vehicle chassis and offset the vehicle in code, but it is still there, it just no longer hits the floor. Any ideas?
Both issues have something to do with the origin. I have tested to see if this issue occurs with physx triangle meshes and it does not. I can change it from convex meshes to the triangle mesh, but if nvidia uses convex meshes then it should work.